|
|

|

|
| e-Pub |
Section: New Results
Pervasive support for Smart Homes
Participants : Andrey Boytsov, Michele Dominici, Bastien Pietropaoli, Sylvain Roche, Frederic Weis [contact] .
A smart home is a residence equipped with information-and-communication-technology (ICT) devices conceived to collaborate in order to anticipate and respond to the needs of the occupants, working to promote their comfort, convenience, security and entertainment while preserving their natural interaction with the environment.
The idea of using the Ubiquitous Computing paradigm in the smart home domain is not new. However, the state-of-the-art solutions only partially adhere to its principles. Often the adopted approach consists in a heavy deployment of sensor nodes, which continuously send a lot of data to a central elaboration unit, in charge of the difficult task of extrapolating meaningful information using complex techniques. This is a logical approach. Aces proposed instead the adoption of a physical approach, in which the information is spread in the environment, carried by the entities themselves, and the elaboration is directly executed by these entities "inside" the physical space. This allows performing meaningful exchanges of data that will thereafter need a less complicate processing compared to the current solutions. The result is a smart home that can, in an easier and better way, integrate the context in its functioning and thus seamlessly deliver more useful and effective user services. Our contribution aims at implementing the physical approach in a domestic environment, showing a solution for improving both comfort and energy savings.
A multi-level context computing architecture
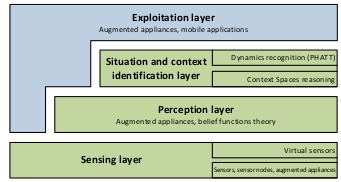
Computing context is a major subject of interest in smart spaces such as smart homes. Contextual data are necessary for services to adapt themselves to the context and to be as efficient as possible. Contextual data may be obtained via augmented appliances capable of communicating their state and a bunch of sensors. It becomes more and more real with the development of the Internet of Things. Unfortunately, the gathered data are not always directly usable to understand what is going on and to build services on them. In order to address this issue, we studied a multi-level context computing architecture divided in four layers:
-
Exploitation layer: the highest layer, it exploits con- textual data to provide adapted services
-
Context and situation identification layer: this is what analyzes ongoing situations and potentially predicts future situations
-
Perception layer: it offers a first layer of abstraction for small pieces of context independent of deployed sensors
-
Sensing layer: it mainly consists of the data gathered by sensors
In this architecture, every layer is based on the results of its underlying layers. In 2013, we studied several methods that enable the building of such levels of abstractions (see figure 2 ). The first level of abstraction coming to mind when describing what people are doing in a Home is high level abstractions such as "cooking". Those activities are then the highest level abstraction we want our system to be able to identify.
We proposed to use plan recognition algorithms to analyze sequences of actions and thus predict future actions of users. It is, in our case, adapted to identify ongoing activities and predict future ones. There exist different plan recognition algorithms. However, one interested us particularly, PHATT introduced by Goldman, Geib and Miller. In order to understand how PHATT is working, it is important to understand the hierarchical task network (HTN) planning problem which is "inverted" by the algorithm to perform plan recognition. It consists in automatically generating a plan starting from a set of tasks to execute and some constraints. In our case, we are able to predict future situations depending of the previously observed situations. To give an example, if we want to predict that the situation dinner will occur soon, it is sufficient to have observed situations such as cooking and/or setting the table. The performances of PHATT have been evaluated by Andrey Andrey Boytstov and Frédéric Weis. These results will be published in 2014.
Propagation of BFT
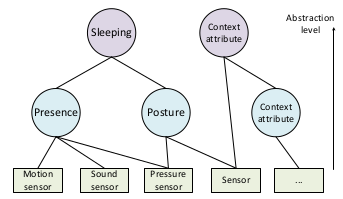
Context-aware applications have to sense the environment in order to adapt themselves and provide with contextual services. This is the case of Smart Homes equipped with sensors and augmented appliances. However, sensors can be numerous, heterogeneous and unreliable. Thus the data fusion is complex and requires a solid theory to handle those problems. For this purpose, we adopted the belief functions theory (BFT). The aim of the data fusion, in our case, is to compute small pieces of context we call context attributes. Those context attributes are diverse and could be for example the presence in a room, the number of people in a room or even that someone may be sleeping in a room. Since the BFT requires a substantial amount of computations, we proposed to reduce as much as possible the number of evidence required to compute a context attribute. Moreover, the number of possible worlds, i.e. the number of possible states for a context attribute, is also an important source of computation. Thus, reducing the number of possible worlds we are working on is also important.
It is especially problematic when working on embedded systems, which may be the case when trying to observe context in smart homes. Thus, with this objective in mind, we observed that some context attributes could be used to compute others. By doing this, the number of gathered and combined evidence for each context attribute could be drastically reduced. This principle is illustrated by Figure 3 : the sets of possible worlds for "Presence" and "Posture" are seen as subsets of "Sleeping". So we proposed and implemented a method to propagate BFT through a set of possible states for a context attribute.
Definition of virtual sensors
In our multi-level architecture, the sensor measures may be imperfect for multiple reasons. The most annoying reasons when deploying a system are biases and noisy measures. It requires fine tuning each type the system is deployed in a new environment. In order to prevent from doing this work again and again at levels where models are hard to build, we proposed to add a new sublayer to the sensing layer (see Figure 2 ): virtual sensors. Instead of modifying high level models, we created sensor abstractions such as motion sensor, sound sensor, temperature sensor, etc. It is particularly convenient when working with typed data such as temperature or sound level. It is possible to use different brands of sensors for sensors of the same type. Thus, those sensors, even if they are measuring the same physical event, can return very different data due to their range, sensibility, voltage, etc. By creating abstraction of sensors, it is possible to build models directly from typed data simplifying even more the building of models as those data have are understandable by humans. Those virtual sensors are built very simply from common heuristics and can be used for ias and noise compensation, Data aggregation and Meta-data generation.
It is also possible in these virtual sensors to implement fault and failure detection mechanisms using the BFT. It enables the detection of fault in the case of sensors of the same type. At higher level, those mechanisms will detect inconsistency between sensors of different types which is not of the same utility. Thus, those virtual virtual sensors, without disabling any features in our architecture, bring more stability for our models. Moreover, by keeping the virtual sensors very simple, they are easy to adapt and tune in a new environment and the overhead in terms of computation is reduced to the minimum and does not really impact the global system performance. Finally, the fine tuning part is always reduced to this level of our architecture and nothing else has to be changed when we move the system from one environment to another.